GridHelper
This package offers utilitary API to help with operations on 2D and 3D grids such as tile extraction, raycasting, and pathfinding.
! 3D API IS STILL EXPERIMENTAL !
Comes with several demo examples.
Online Demos
Usage
All you need to use this API is a two-dimensional array (three-dimensional for 3D API) of tiles.
What is a tile ? Any object (custom class, struct, component, …) that implements the very light ITile interface of this library (ITile3D for the 3D API). This interface requires four properties getters (five for 3D API):
- bool IsWalkable . Must return if the tile can be walk/see throught (for pathfinding/raycasting)
- float Weight . Must return the tile’s weight (the ‘cost’ it will takes to walk throught that tile). Minimum is 1.
- int X . Must return the horizontal position of the tile into the grid
- int Y . Must return the vertical position of the tile into the grid
- int Z . Must return the depth position of the tile into the grid (only for the 3D API and its ITile3D interface)
This API is using a namespace so you have to add a using instruction to the scripts that will need this library:
using KevinCastejon.GridHelper;
or for the 3D API:
using KevinCastejon.GridHelper3D;
2D API
MajorOrder
When working with two-dimensional arrays there is two ways of storing tiles, first rows then lines or the opposite.
This is called the Major Order, you can specify it on the last parameter of each method that uses a grid.
DEFAULT : Refers to the global setting DefaultMajorOrder value
ROW_MAJOR_ORDER : YX. First index is rows, second is columns
COLUMN_MAJOR_ORDER : XY. First index is columns, second is rows

- Extraction
Allows you to extract tiles on a grid.
Provides shape extraction (rectangles, circles, cones and lines) and neighbors extraction with a lot of parameters.
You can extract tiles from shapes.
- GetTilesInARectangle
YourCustomTileType[] tiles = Extraction.GetTilesInARectangle(grid, centerTile, rectangleSize); - GetTilesInACircle
YourCustomTileType[] tiles = Extraction.GetTilesInACircle(grid, centerTile, radius); - GetTilesInACone
YourCustomTileType[] tiles = Extraction.GetTilesInACone(grid, startTile, length, openingAngle, direction); - GetTilesOnALine
YourCustomTileType[] tiles = Extraction.GetTilesOnALine(grid, startTile, length, direction);
You can extract neighbors of a tile (if existing).
- GetTileNeighbour
YourCustomTileType upperNeighbour = Extraction.GetTileNeighbour(grid, tile, Vector2Int.up); - GetTileNeighbours
YourCustomTileType[] neighbours = Extraction.GetTileNeighbours(grid, tile); - GetTileOrthogonalsNeighbours
YourCustomTileType[] orthogonalNeighbours = Extraction.GetTileOrthogonalsNeighbours(grid, tile); - GetTileDiagonalsNeighbours
YourCustomTileType[] diagonalsNeighbours = Extraction.GetTileDiagonalsNeighbours(grid, tile);
Each extraction method has a variant to check if a specific tile would be extracted
- IsTileInARectangle
bool isTileInARectangle = Extraction3D.IsTileInARectangle(grid, tile, centerTile, rectangleSize); - IsTileInACircle
bool isTileInACircle = Extraction3D.IsTileInACircle(grid, tile, centerTile, radius); - IsTileInACone
bool isTileInACone = Extraction.IsTileInACone(grid, tile, centerTile, length, openingAngle, direction); - IsTilesOnALine
bool isTilesOnALine = Extraction.IsTilesOnALine(grid, tile, centerTile, length, direction); - IsTileNeighbor
bool isTileRightNeighbor = Extraction.IsTileNeighbor(tile, neighbor, Vector2Int.right); - IsTileOrthogonalNeighbor
bool isTileOrthogonalNeighbor = Extraction.IsTileOrthogonalNeighbor(tile, neighbor); - IsTileDiagonalNeighbor
bool isTileDiagonalNeighbor = Extraction.IsTileDiagonalNeighbor(tile, neighbor); - IsTileAnyNeighbor
bool isTileNeighbor = Extraction.IsTileAnyNeighbor(tile, neighbor);
- Raycasting
Allows you to cast lines of sight and cones of vision on a grid
You can get the line of sight from a tile (a line that “stops” at the first encountered unwalkable tile).
Many signatures are available to specify the length and direction of the line.
- GetLineOfSight
YourCustomTileType[] lineOfSight = Raycasting.GetLineOfSight(grid, startTile, destinationTile);
You can get the cone of vision from a tile.
Many signatures are available to specify the length and direction of the cone. - GetConeOfVision
YourCustomTileType[] coneOfVision = Raycasting.GetConeOfVision(grid, startTile, openingAngle, destinationTile);
You can check if a line of sight or a cone of vision is clear (no non-walkable tile encountered)
- IsLineOfSightClear
bool isLineClear = Raycasting.IsLineOfSightClear(grid, startTile, destinationTile); - IsConeOfVisionClear
bool isConeClear = Raycasting.IsConeOfVisionClear(grid, startTile, destinationTile);
- Pathfinding
Allows you to calculate paths between tiles.
This API offers several way of doing pathfinding.
You can calculate the path directly every time you need (with the CalculatePath method), but this can become heavy if you do it too frequently.
Instead, you can generate objects that will hold multiple paths data that can be reused later. There is two types of objects that you can generate:
- PathMap - Will calculate and hold all the paths to a specific tile from every accessible tiles
- PathGrid - Will calculate and hold all the paths between each tiles on the entire grid
Note that, obviously, any path calculation is valid as long as the walkable state of the tiles remain unchanged
You can directly calculate the path between two tiles. If there is no path between the two tiles then an empty array will be returned.
You can specify a pathfindingPolicy parameter that holds parameters relating to diagonals and allowed movements. (see PathfindingPolicy)
Note that this method uses a Djikstra algorythm which can be quite intensive
- CalculatePath
YourCustomTileType[] path = Pathfinding.CalculatePath(grid, startTile, destinationTile);
You can also calculate the path between a start tile and the closest of several destination tiles. Just pass an array of tiles instead of unique tile as third parameter.
PathMap
You can generate a PathMap object that holds pre-calculated paths data.
This way of doing pathfinding is useful for some usages (like Tower Defenses and more) because it calculates once all the paths between one tile, called the “target”, and all the accessible tiles from it. (The PathMap generation uses Dijkstra algorithm).
To generate the PathMap object, use the GeneratePathMap method that needs the grid and the target tile from which to calculate the paths, as parameters.
You can use an optional maxDistance parameter that limits the paths calculation to an amount of distance (movement ‘cost’ taking into account the tiles weights). Default is 0 and means no distance limit (paths to all tiles accessible from the target will be calculated).
You can specify a pathfindingPolicy parameter that holds parameters relating to diagonals and allowed movements. (see PathfindingPolicy)
Note that a PathMap generation uses a Djikstra algorythm which can be quite intensive, same as the direct path calculation method but is intended to be used less often as the calculated paths hold by the PathMap can be reused with nearly “no cost”
PathMap<YourCustomTileType> pathMap = Pathfinding.GeneratePathMap(grid, targetTile);
Once the PathMap object is generated, you can use its several and almost “cost free” methods and properties.
You can retrieve the tile that has been used as the target to generate this PathMap
- Target
YourCustomTileType tile = pathMap.Target;
You can retrieve the maxDistance parameter value that has been used to generate this PathMap. 0 means no distance limit
- MaxDistance
float maxDistance = pathMap.MaxDistance;
You can retrieve the majorOrder parameter value that has been used to generate this PathMap
- MajorOrder
MajorOrder majorOrder = pathMap.MajorOrder;
You can get all the accessible tiles from the target tile.
- GetAccessibleTiles
YourCustomTileType[] tiles = GridHelper.GetAccessibleTiles();
You can get all the tiles on the path from a tile to the target.
- GetPathToTarget
YourCustomTileType[] tiles = pathMap.GetPathToTarget(startTile);
Or you can get all the tiles on the path from the target to a tile.
- GetPathFromTarget
YourCustomTileType[] tiles = pathMap.GetPathFromTarget(destinationTile);
You can know if a tile is accessible from the target tile. This is useful before calling the following PathMap methods that only takes an accessible tile as parameter.
- IsTileAccessible
bool isTileAccessible = pathMap.IsTileAccessible(tile);
You can get the next tile on the path between the target and a tile.
- GetNextTileFromTile
YourCustomTileType nextTile = pathMap.GetNextTileFromTile(tile);
You can get the next tile direction on the path between the target and a tile (in 2D grid coordinates).
- GetNextTileDirectionFromTile
Vector2 nextTileDirection = pathMap.GetNextTileDirectionFromTile(tile);
You can get the distance to the target from a tile.
- GetDistanceToTargetFromTile
float cost = pathMap.GetDistanceToTargetFromTile(tile);
PathGrid
You can generate a PathGrid object that holds pre-calculated paths data.
This way of doing pathfinding is useful for some usages because it calculates once all the paths between each tile on the entire grid. (The PathGrid generation uses Dijkstra algorithm on each tile of the grid).
To generate the PathGrid object, use the GeneratePathGrid method that needs the grid as parameter.
You can specify a pathfindingPolicy parameter that holds parameters relating to diagonals and allowed movements. (see PathfindingPolicy)
Note that a PathGrid generation uses a Djikstra algorythm on each tile of the grid which can be really intensive. Hopefully, in the future, asynchronous features will be added.
PathGrid<YourCustomTileType> pathGrid = Pathfinding.GeneratePathGrid(grid);
Once the PathGrid object is generated, you can use its several and almost “cost free” methods and properties.
You can retrieve the majorOrder parameter value that has been used to generate this PathMap
- MajorOrder
MajorOrder majorOrder = pathMap.MajorOrder;
You can know if there is a clear path between two tiles.
- IsPath
bool isPath = GridHelper.IsPath(startTile, destinationTile);
You can get all the tiles on the path from a start tile to a destination tile. If there is no path between the two tiles then an empty array will be returned.
- GetPath
YourCustomTileType[] path = pathMap.GetPath(startTile, destinationTile);
You can get the next tile on the path from a start tile to the destination tile.
- GetNextTileFromTile
YourCustomTileType nextTile = pathMap.GetNextTileFromTile(startTile, destinationTile);
You can get the next tile direction on the path from a start tile to the destination tile (in 2D grid coordinates).
- GetNextTileDirectionFromTile
Vector2 nextTileDirection = pathMap.GetNextTileDirectionFromTile(startTile, destinationTile);
You can get the distance (movement cost) from a start tile to the destination tile.
- GetDistanceBetweenTiles
float cost = pathMap.GetDistanceBetweenTiles(startTile, destinationTile);
- PathfindingPolicy
The PathfindingPolicy object holds settings relating to diagonals and allowed movements.
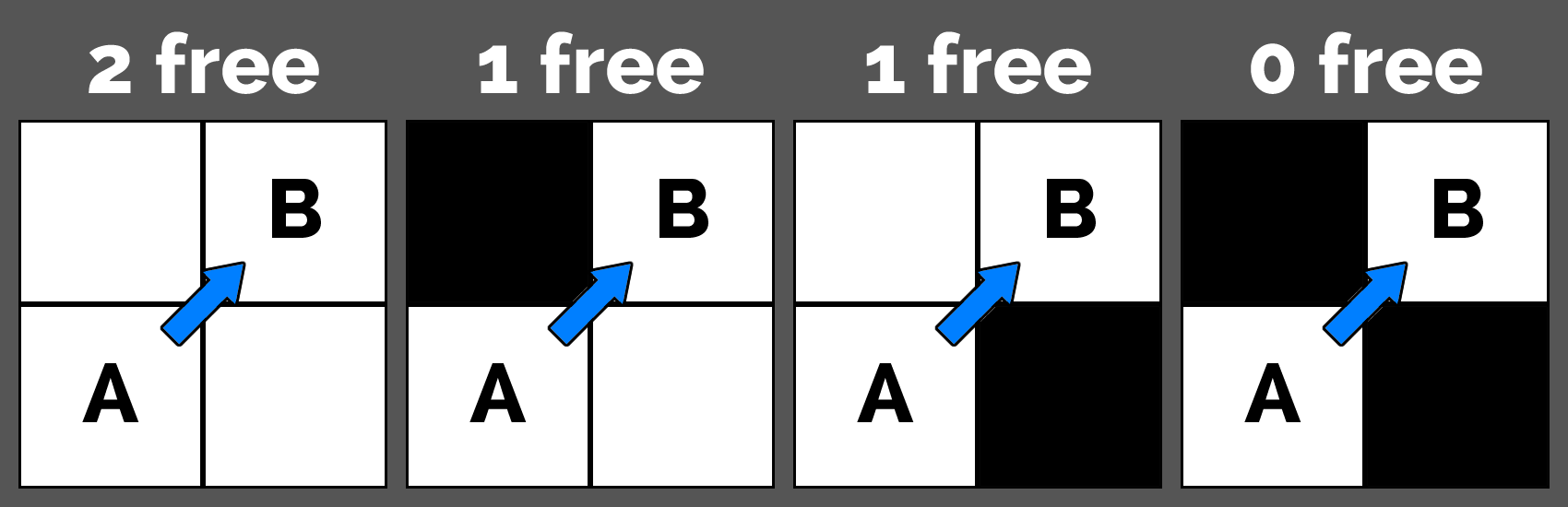
You can set the DiagonalsPolicy that represents the diagonals permissiveness. When going diagonally from a tile A to tile B in 2D grid, there are two more tile involved, the ones that are orthogonal neighbours of both the A and B tiles. You can allow diagonals movement depending on the walkable status of these tiles.
- DiagonalsPolicy
pathfindingPolicy.DiagonalsPolicy = DiagonalsPolicy.ALL_DIAGONALS;- NONE : no diagonal movement allowed
- DIAGONAL_2FREE : only diagonal movements with two walkable orthogonal neighbours from both the start and destination tiles are allowed
- DIAGONAL_1FREE : only diagonal movements with one walkable orthogonal neighbours from both the start and destination tiles are allowed
- ALL_DIAGONALS : all diagonal movements allowed
You can set the diagonals weight ratio multiplier that will increase the tile’s weight when moving to it diagonally.
Minimum is 1. Default is 1.4142135623730950488016887242097.
Note that setting diagonals weight to 1 can lead to unpredictable behaviours on pathfinding as a diagonal move would have the same cost than orthogonal one, so the paths could become “serrated” (but still the shortests!).
- DiagonalsWeight
pathfindingPolicy.DiagonalsWeight = 1.5f;
You can set the MovementPolicy that represents the movement permissiveness. It is useful to allow special movement, especially for side-view games, such as spiders that can walk on walls or roofs, or flying characters. Default is FLY. Top-down view grid based games should not use other value than the default as they do not hold concept of “gravity” nor “up-and-down”.
Note that this parameter is a flag enumeration, so you can cumulate multiple states, the FLY state being the most permissive and making useless its combination with any other one.
- MovementPolicy
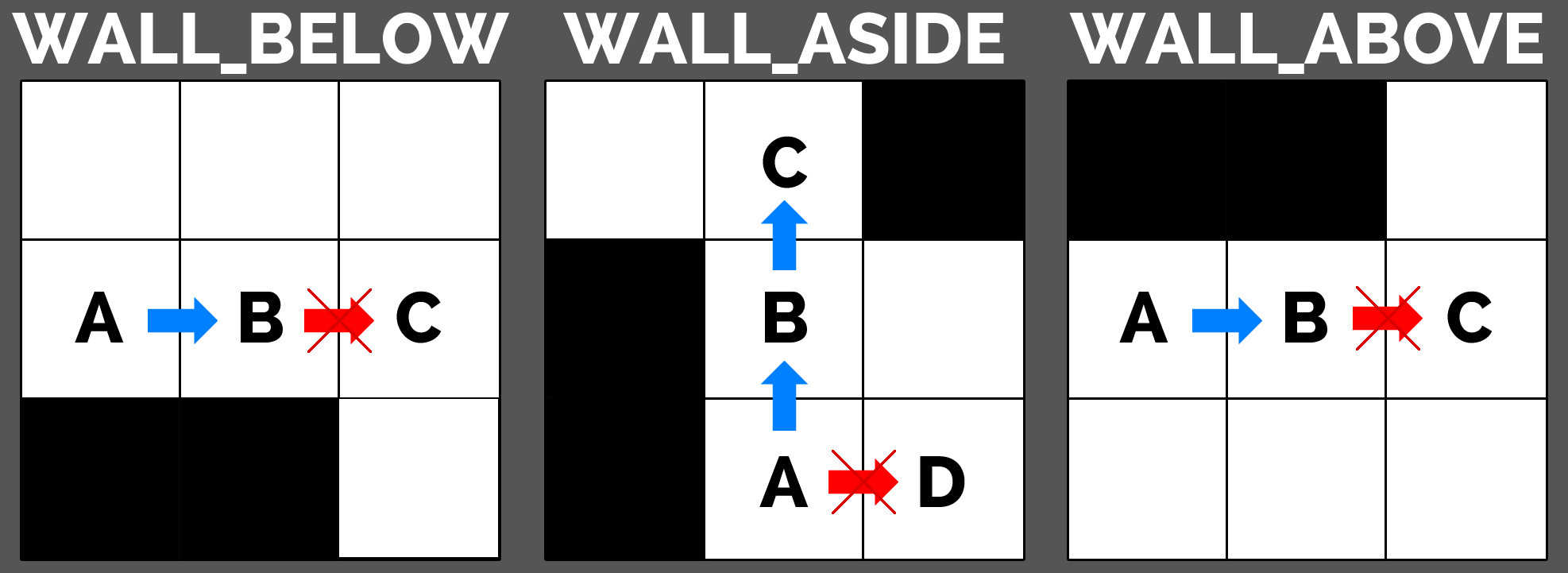
pathfindingPolicy.MovementPolicy = MovementPolicy.ALL_DIAGONALS;- FLY : all walkable tiles can be walk thought
- WALL_BELOW : the walkable tiles that has a not-walkable lower neighbour can be walk thought
- WALL_ASIDE : the walkable tiles that has a not-walkable side neighbour can be walk thought
- WALL_ABOVE : the walkable tiles that has a not-walkable upper neighbour can be walk thought